Y bueno ... ya está!!! :) :) :)
Al tener mayor contacto con el suelo por la oruga, el sistema consume mas energía (mayor fuerza de fricción o rozamiento .. como lo visto en clase), eso implica que las pilas se descargan mas rápidamente.
La solución es utilizar unas baterías de alto rendimiento, en este caso use una de ácido, como las de las motos. Los datos de la batería son:
- Voltaje: 6v
- Corriente: 1.2A
- Autonomía: 20 horas
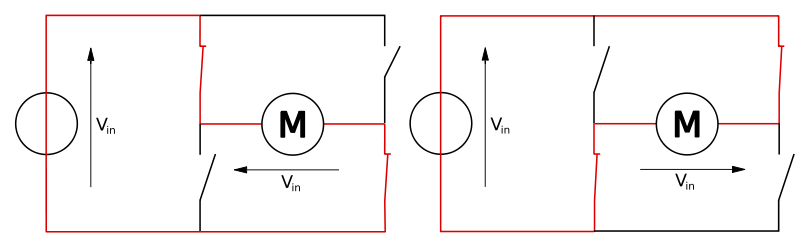
Como lo habíamos visto en las clases, los motores se controlan con un puente H, el cual ya esta todo integrado en un solo chip, de referencia L293D. Este chip posee internamente dos puentes H.
En Enero (si regreso :) ), llevo a BoBT para que lo controlen con sus celulares y pasamos a la segunda etapa, la cual es que el robot sea autónomo en sus movimientos (con sensores) y que nos envíe la información de la velocidad y otras cosillas que se les ocurran.
Unas fotos de los módulos fabricados:
Puente H:

Trae tres conectores: dos de ellos son para enviar los 1 y 0 para el control de giro de los motores, y el otro es con los voltajes de alimentación. Los cables negro y rojo son de los motores.
Controlador PIC:

Este es el cerebro del bot. Internamente se programan las acciones que debe realizar para controlar el giro de los motores y recibir los datos vía Bluetooth. Recuerdan que hablamos de que el controlador es capaz de realizar tareas con una velocidad impresionante (millonésimas de segundo).
Bluetooth:

Es el encargado de traducir la información de radiofrecuencia a una que entienda el PIC o cerebro. Todos los celulares (que tengan Bluetooth) poseen internamente un módulo similar a éste para poder funcionar. Casi me quedo sin ojos al soldar ese módulo @_@
La base tipo oruga posee unos orificios para atornillar una base, y tapar de esa manera los piñones y cables. En estos días me hago a una para que quede mejor presentado porque el desorden siempre es notorio (el del robot, por si acaso; aunque la mesa también jejejeje):

Nuevos retos:
- Controlarlo vía WiFi (para que lo controles con tu PC vía internet desde cualquier parte del mundo)
- Agregarle "sentidos", es decir sensores para distancia, posición (GPS), velocidad, aceleración ... etc
- Los que uds propongan :)
Espero les guste :)